

Having finished the bulk of the avionics installation, it was time to think about installing the plastic trim pieces in the cockpit. Before proceeding with trim installation, I had a few remaining tasks. In this post I will describe how I interfaced a Boeing OEM nose tiller.
When I purchased my cockpit in 2011, the complete nose wheel tiller mechanism was present. It worked fine, but was in need of cosmetic improvements. I was looking for a way to refinish the wheel itself, which is covered with a very thick, chip resistant coating, when a new-old-stock (NOS) OEM unit came up for sale on eBay…$79.50 plus shipping.
Since the initial design of the Boeing 737, nose wheel steering on the ground has been augmented by a metal control wheel just to left of the Captain’s thigh. On the ground, the airplane can be steered by differential thrust on the engines, but for fine control, especially at low speeds, the steering tiller is used to direct the nose wheel. Larger Boeing aircraft have this control duplicated for the FO, but in the 737, only one tiller is installed on the Captain’s side. In the actual aircraft, the tiller mechanism is connected to the rudder pedal linkage under the flight deck floor via steel cables. In the interest of time I elected to implement my steering tiller as an independent unit.
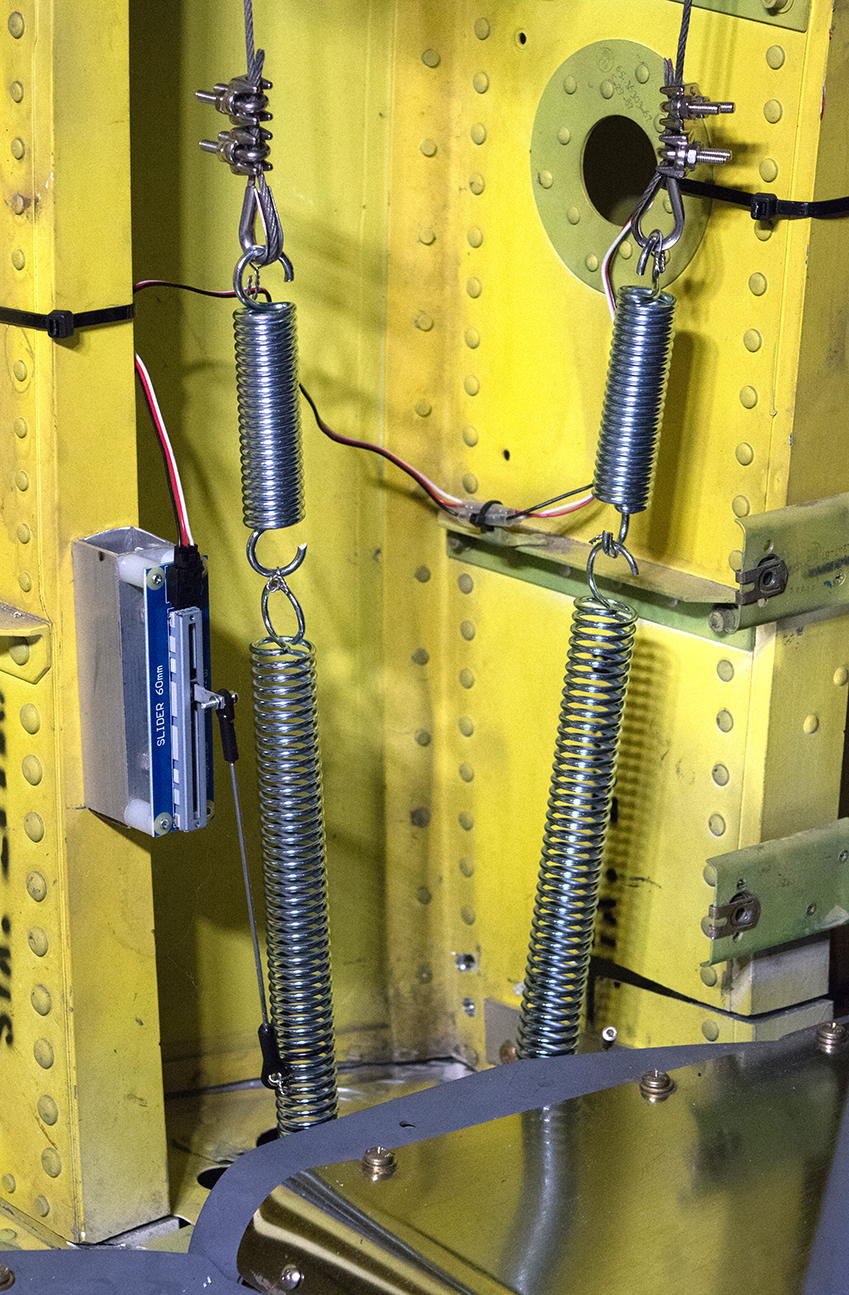
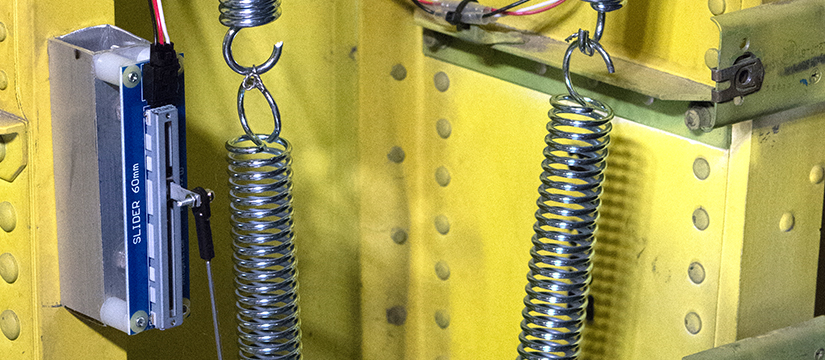
I simply cut the steel cables and fitted the ends with heavy duty springs. A short piece of RC modeling rod is used to connect one spring to a Phidgets 60mm sliding potentiometer. This pot is then connected to a joystick card (eg Leo Bodnar BU0836X) and the axis is calibrated in FSUIPC. The video below shows how the RC rod is connected to the part of the spring with an amount of travel that is appropriate to the pot.